
移乗動作の中でも「立ち上がり」は、利用者と介助者どちらにも大きな負担がかかる動作です。
前回の記事では、移乗介助における姿勢・重心・支持基底面といった人間工学の視点から体にかかる負担について解説しました。
→人間工学から考える移乗介助と腰痛
今回は、最近注目されている移乗支援機器の中から『Hug』というロボットを取り上げます。
この記事では、Hugとはどのような機器なのか、そしてこの機器が「立ち上がり動作」をどのように支援しているのか、特許の内容を含めて深掘りして解説していきます。
なお、本記事は筆者個人の見解・調査に基づいた内容です。
内容の正確性を保証するものではなく、紹介する製品の購入・使用は必ずご自身の判断と責任で行ってください。
本記事の英語版はこちら→How the Hug Stand-Assist Robot Supports Standing Up
Hugとは
Hugは、人が立ち上がるときの身体の軌跡を倣い、利用者の動きを前方から支えて立位へ導く移乗支援ロボットです。
従来のリフトのようにスリングで吊り上げるのではなく、利用者の姿勢と動きを誘導しながら立たせることができる点が特徴です。
Hug本体はキャスターで移動可能なため、利用者は立位のまま、介助者が目的地まで移動し、そのまま着座まで連続して行うことができます。
Hugのメカニズム
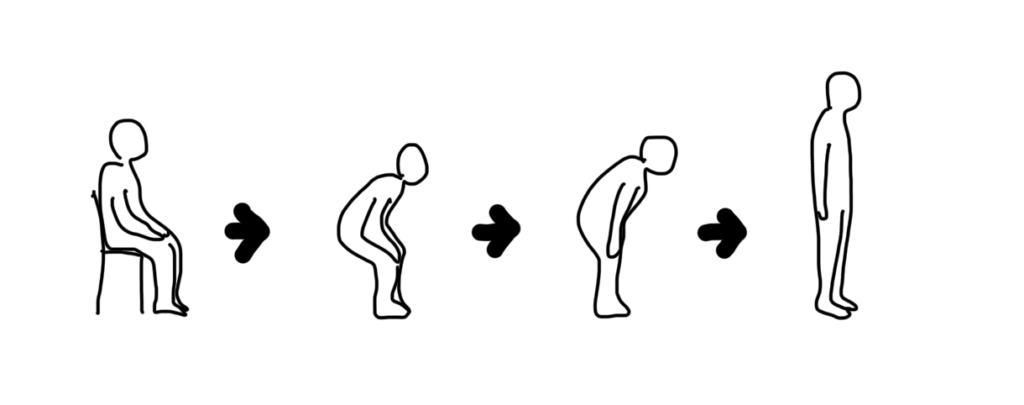
Hugのメカニズムを理解するため、まず、人の立ち上がり動作そのものを説明します。
立ち上がりは複数の関節運動・重心移動・バランス調整が連動して行われる、高度な動作です。
前回の記事では、立ち上がり動作をその不安定さに着目して説明しましたが、ここではSchenkmanの4相モデルに沿って見ていきます。
Schenkmanの立ち上がりモデル
PhaseⅠ 屈曲相
体幹が前傾し、上半身が前方へ倒れ込む方向のモーメントが生じる段階です。
殿部はまだ座面にあります。
PhaseⅡ 移行相
殿部が座面から離れ、荷重が踵寄りに乗っていく段階です。
支持基底面が座面から足へ移るものの、重心はまだ後方にあるため不安定な状態となります。
PhaseⅢ 伸展相
股関節・膝関節を伸ばすことで身体を上へ押し上げ、重心が足部の支持基底面内に移動します。
PhaseⅣ 安定相
全ての立ち上がりの動作が終わり、体幹バランスで姿勢を保持して立位となります。
Hugによる立ち上がり
では、人の立ち上がりモデルと、Hugを開発した株式会社FUJIから出願されている特許明細書(特開2020-168536)の内容、公式サイトの製品説明などを踏まえ、Hugがどのように立ち上がりをサポートしているのかを見ていきます。
特許内の説明では、起立補助の動きを
第一動作:座位~中間姿勢
第二動作:中間姿勢~立位
という2つの段階に分けて説明しています。
第一動作(PhaseⅠ〜Ⅱ)
初めは、利用者は椅子に座り、足は足載せ台に置き、下腿を膝当てに軽く当てた姿勢です。
利用者の体型により昇降部の高さを合わせることで、胸部〜腹部がちょうど胴体受けパッドに当たり、両脇が脇受けパッドに乗り、グリップを握った少し前傾した座位をとります。
そして、リモコンの“立つ”ボタンを押すことで、ここから 第一動作 が始まります。
第一動作では、
・昇降部30:下降
・アーム40:前旋回(前方へ回転)
という2つの動きが協調して行われます。
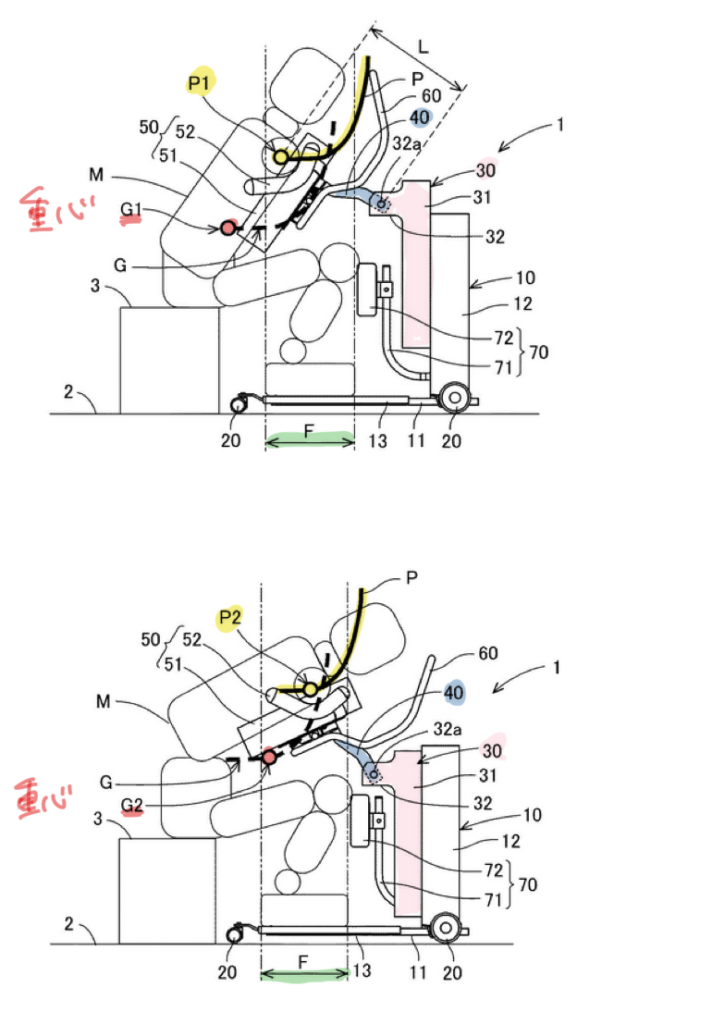
図:特開2020-168536「介助ロボット」(株式会社FUJI)を基に作成
その結果、
・肩の位置Pは、ほぼ水平に前方へスライドしながら胴体受けパッドの後端51が持ち上がり、背筋が伸びて骨盤が立った前傾姿勢
・殿部はまだ座面についたまま、重心は徐々に前へ移動し、重心が足底の範囲の中に入る中間姿勢
となります。
この第一動作は、4相モデルのPhaseⅠ~PhaseⅡの初めにあたり、ロボットの誘導により、体幹を前傾させて立ち上がるためのモーメントを作り、殿部が離れる直前までに、重心を足の上まで移動させている段階と考えられます。
特許内では、第一動作における従来の機器の問題が記載されています。
従来の利用者の肘をテーブルに乗せた状態でそのテーブルを前方へ回転させながら持ち上げるような移乗機器では、重心が後ろのまま上半身だけ持ち上がるため不快感がありました。
Hugにおいてはその不快感を軽減するため、アーム40の前旋回だけでなく、それと同時に昇降部30を下降させています。
その結果、上半身が持ち上がることなく、座面に臀部を残したまま、前傾姿勢を作ることができる設計となっています。
第二動作(PhaseⅡ〜Ⅲ)
中間姿勢で重心が足底の範囲に移動したあとの第二動作では、
・昇降部30:下降から「上昇」へ
・アーム40:引き続き「前旋回」
という動きに変わります。
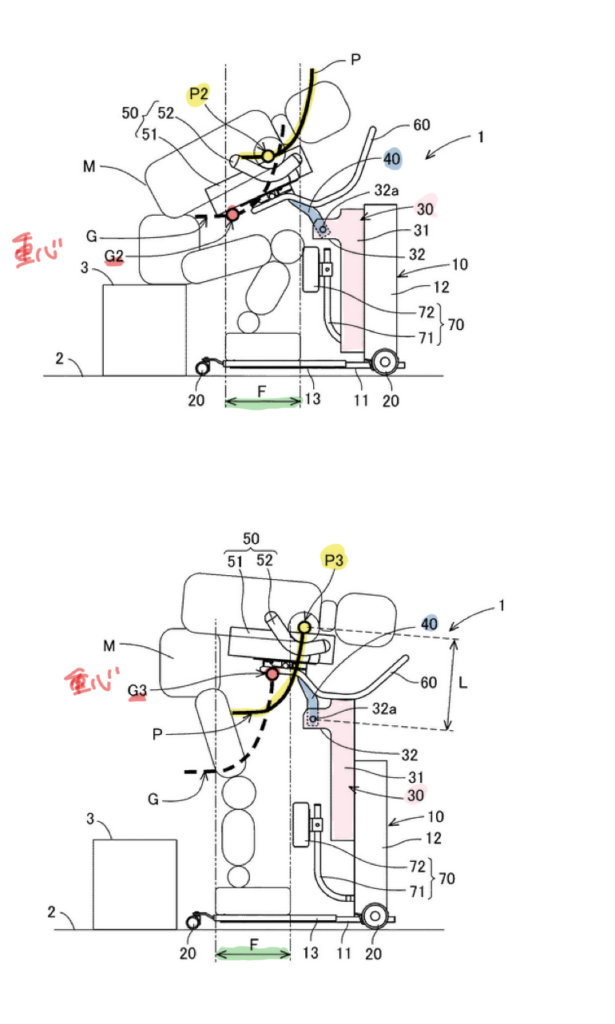
図:特開2020-168536「介助ロボット」(株式会社FUJI)を基に作成
その結果、
肩の位置Pは前進しながらほぼ真上方向に移動、
→臀部が座面から離れて上昇し、
→上半身は前屈みで背筋が伸びたまま持ち上がります。
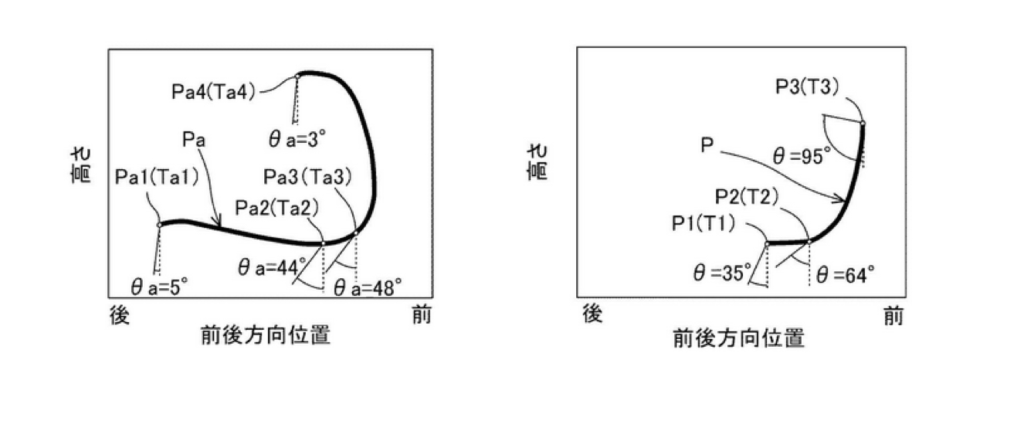
本来、人の立ち上がりでは、PhaseⅢに入ると上半身は大きく前傾した後、最後は後方へ戻る後ろへの回転が生じます。
明細書内で示された肩位置の軌跡を見ても、「前 → 上 → やや後」の弧を描いているのがわかります。
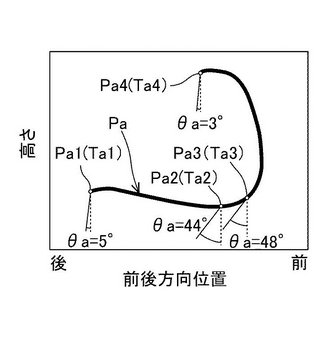
出典:特開2020-168536「介助ロボット」図面(株式会社FUJI)
この動きによって、重心を足底内に移して安定した立位に移行しているのです。
しかしHugでは、アーム40が後旋回を行わない構造となっており、後ろへ起き上がらず胴体は前傾のまま、肩位置Pも「前 → 上」というように動きます。
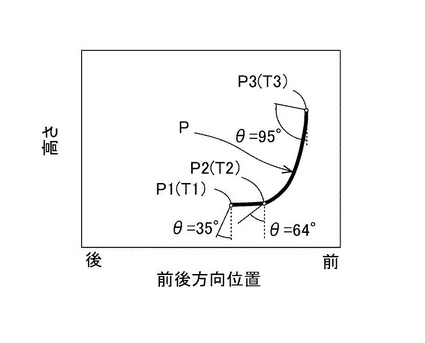
出典:特開2020-168536「介助ロボット」図面(株式会社FUJI)
これは、Hugは最終的に前屈み姿勢になるため、人が行う立ち上がりとは重心の最終位置が異なるからです。
それでも、立ち上がりの途中では本来の動作の一部を模倣しており、重心が足底の範囲に移ることで、特許にも「気持ちよく立ち上がることができる」と記載されています。
出典:特開2020-168536「介助ロボット」図面(株式会社FUJI)
つまり、Hugの動きによって、通常の立ち上がりと同じように、自分の足で支えるという自然な感覚で立ち上がれるのだと思います。
この第二動作は、4相モデルのPhaseⅡ終わり~PhaseⅢの殿部が離れて重心がしっかり足に乗り、股関節・膝関節を伸ばして身体を持ち上げていく段階にあたると考えられます。
このとき、Hugが胸部・脇のパッドと昇降部が上方向へ身体を支えるため、下肢筋力が弱くても立位になれる設計になっています。
下半身立位の完成(PhaseⅣ)
第二動作が終わると、利用者はやや前屈みの立位となります。
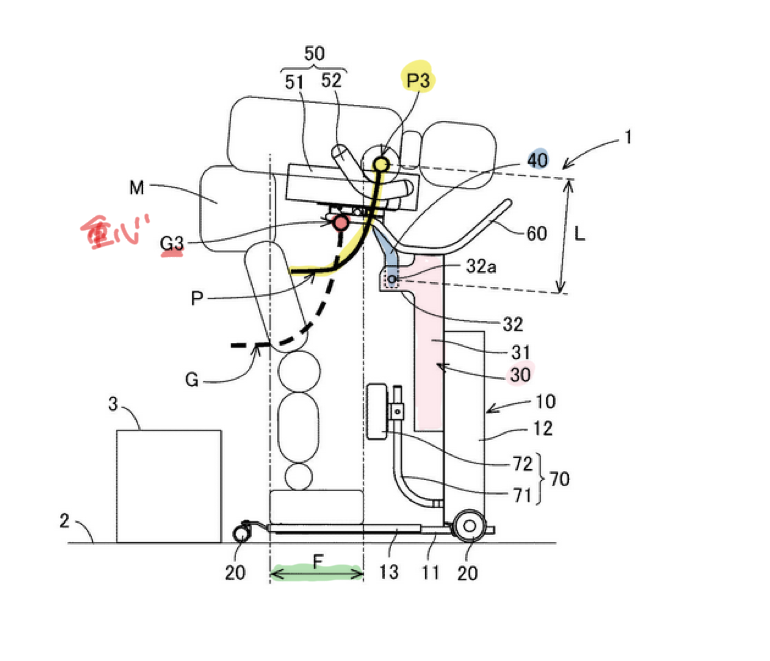
図:特開2020-168536「介助ロボット」(株式会社FUJI)を基に作成
Hugサポートでの立位は、特許内の言葉でいうと、
「少なくとも下半身が立っている状態」
ということになります。
前屈みではありますが、重心G3は足底の支持基底面F内にありつつ、胸部・脇・膝部分を支えることで、
筋力や体幹バランス能力が低くても前に倒れずに姿勢を保つことができます。
つまりHugは、人の本来の立ち上がり動作の重心移動をできるだけ再現しながら、最終的には前方支持のまま下半身を立位へ誘導することで、自然で安定した立ち上がりができるよう設計されているのではないかと思います。
Hug使用の向き・不向き
ここまで見てきたHugの構造や仕組み、製品情報を踏まえると、Hugの活用しやすい場面や、反対に使うのが難しいと考えられる場面が見えてきました。
※以下の内容は、私自身の考察も含まれるため、実際の使用にあたっては、専門家やメーカーへ確認して判断をお願いします。
Hugが活用できそうなケース
● 立ち上がりで膝折れしやすくふらつきやすい方:
前方から身体を支える構造のため、体幹の筋力やバランス力が低下していても姿勢の安定しやすいとされています。
● 下肢筋力が弱く、膝伸展が難しい方:
昇降部の動きにより、下肢の筋力が低下していても膝が伸びる動きが誘導され、膝部が支持されるので、膝関節がしっかり伸びきらなくても立位となれるよう設計されています。
また、Hugによって自力では難しい立位がとれるようになれば、離床の機会が増えて、拘縮の予防にも繋がると思います。
● トイレ動作や入浴の場面:
トイレ介助の際、立位が不安定な場合には介助者一人が前で抱えて、もう一人が後ろからズボンを下ろすなどのケアを行うことがあります。
Hugでは機械が前方を支えてくれるため、スタッフ一人の介助で後ろからの排泄介助がしやすそうです。
また、防水仕様のモデルは浴室で使えるため、座位では洗いにくい臀部のケアにも使いやすいのではないかと思います。
● 手間なく簡単な機器を使いたい場合:
従来のリフトのようなスリングを着ける手間がないため、施設や在宅にも導入しやすいと思われます。
● 介助者の身体の負荷を軽減したい場面:
Hugが立ち上がりを誘導→その立位のまま移動→着座が行えるため、介助負担の軽減につながりそうです。
Hugの使用が難しそうなケース
● 麻痺や骨折などで足の荷重が困難
● 足関節の拘縮により、足底がしっかり接地できない場合
● 認知症の症状により、機器に対して強く抵抗がみられる場合
現場での活用
10月に参加した展示会では、Hugのブースは規模も大きく、多くの来場者が関心をよせているのが伝わってきました。
私自身も実際にHugの移乗を体験してみましたが、機械に身体を預けるだけで浮き上がるような感覚があり、一瞬びっくりしたものの、足はしっかり床についたままなので怖さはなく、無理に持ち上げられている感覚が少ないという印象でした。
私はまだ実際の介護現場で使ったことはありませんが、介護の新聞では、Hug導入により排泄介助の負担が軽減した例が紹介されています。
記事によれば、その施設では排泄支援に力を入れており、約9割の利用者がトイレ排泄を行えているとのことでした。
Hug導入により、介護者負担軽減になっているだけでなく、利用者の身体機能や尊厳を守るケアに繋がっているのだと感じます。
このように、現在はさまざまな移乗機器が登場していますが、その中でもHugが現場で注目されている理由の一つとして、利用者に何かを装着する手間がなく、操作がとてもシンプルであるという点が挙げられると思います。
介護分野でのテクノロジーの導入は、主に人手不足を補うために進められています。
そのため、どれだけ利用者にとって良い機器であっても、介護者側の手間が大きいと、忙しい現場では「まず試してみる」ところにすらたどりつかないのではないかと感じています。
現場では「利用者のため」が大前提とはいえ、実際は介護者側にもメリットがあるかどうかがとても重要です。
Hugはその両方を満たしているからこそ、導入が進み始めているのではないでしょうか。
そして、導入の際にもう一つ大切なのが、やはり費用のことです。
Hugは機種によって価格が異なりますが、施設で購入する場合は自治体の介護ロボット導入補助金の対象になることがあります。
また、在宅で使いたい場合は、介護保険の福祉用具貸与(レンタル)の対象になるようで、1〜3割負担になります。
※最新の情報はメーカーや自治体、ケアマネにお問い合わせください。
おわりに
Hugを初めて見た時、介助する側として使いやすそうという印象でした。
しかし、展示会での体験や、今回あらためて仕組みを読み解いたことで、利用者が安心して立ち上がれるよう、細かな工夫が積み重ねられている機器なのだと知りました。
動きの原理を知ることで、利用者に合わせた使い方や、場面に応じた選び方をより専門的にアドバイスできるようになると感じています。
次回は、Hugとは違う原理で移乗を支援する機器を紹介し、それぞれの特徴を踏まえながら、現場でどのように使い分けられるのかを考えていきたいと思います。
現在、このような看護師としての現場の視点と、特許への知見を活かした情報発信とともに、医療材料やケア用品の解説や技術記事の執筆、市場展開支援なども行っています。
ご関心のある方はブログ内フォームからお気軽にご連絡ください。
※本記事の内容は参考情報であり、正確性を保証するものではありません。
製品の購入や使用はご自身の判断と責任でお願いいたします。
参照
特開2020-168536「介助ロボット」株式会社FUJI,公開日:2020年10月15日,公開番号:P2020-168536A
小川鑛一(2008)『イラストで学ぶ看護人間工学』東京電機大学出版局.
介護の日しんぶん(2025年11月11日号)
介護サポートロボットHug https://hug.fuji.co.jp/
動作成立のための運動制御に関する研究 https://www.jstage.jst.go.jp/article/rika/20/4/20_4_303/_pdf?utm_source=chatgpt.com
Kinematic analysis of the human body during sit-to-stand in healthy young adults https://pmc.ncbi.nlm.nih.gov/articles/PMC8183776/?utm_source=chatgpt.com

