
Standing up is one of the most demanding movements in transfer care — not only for the person receiving support but also for the caregiver providing it.
In my previous article, I discussed physical load during transfers from an ergonomics perspective, focusing on posture, center of gravity, and the base of support.
→ Ergonomic Perspectives on Transfer Assistance and Low Back Pain
In this article, I take a closer look at Hug, a stand-assist robot that has been gaining attention in recent years.
I will explain what Hug is, how it assists the standing motion, and how its mechanism relates to the concepts described in its patent.
Please note that this article reflects my personal understanding based on my own research.
It is not intended to guarantee accuracy, and any decision to purchase or use the product should be made at your own discretion.
What Is Hug?
Hug is a transfer-assist robot designed to guide a user into standing by replicating the natural trajectory of human movement.
Unlike conventional lifts that raise the body using a sling, Hug supports the user from the front and leads the body into a standing position by encouraging proper posture and movement.
Because the unit has casters, the user can remain in a supported standing position while being moved to another location, and can sit down again smoothly afterward.
How Hug Works
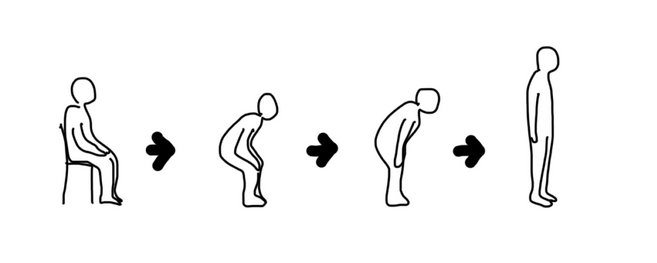
To understand Hug’s mechanism, it is helpful to first review how people naturally stand up.
Standing is a complex motion in which multiple joints move in coordination, the center of gravity shifts forward, and balance is adjusted continuously.
Here, I explain it using Schenkman’s four-phase model of sit-to-stand movement.
Schenkman’s Sit-to-Stand Model
Phase I: Flexion Momentum Phase
The trunk leans forward, generating a forward flexion moment.
The buttocks remain in contact with the seat.
Phase II: Momentum Transfer Phase
The buttocks lift off the seat as body weight shifts toward the heels.
The base of support moves from the seat to the feet, while the center of gravity is still slightly behind, making this a relatively unstable moment.
Phase III: Extension Phase
The hips and knees extend, pushing the body upward and bringing the center of gravity fully within the foot’s base of support.
Phase IV: Stabilization Phase
The movement ends in an upright stance where balance is maintained through trunk control.
How Hug Assists the Sit-to-Stand Motion
The manufacturer, FUJI, describes Hug’s movement in its patent (JP2020-168536A) as two stages:
- First Stage: Sitting → Intermediate posture
- Second Stage: Intermediate posture → Standing
Below, I compare these stages with the phases of the sit-to-stand model.
First Stage (Phase I–early Phase II)
The user begins seated, with their feet on the footplate and their shins lightly touching the knee pads.
The height of the lifting unit is adjusted so the chest and abdomen fit against the torso pad, the underarms rest on the side pads, and the user grips the handles in a slightly forward-leaning seated posture.
When the “Stand” button on the remote is pressed, the first stage begins.
During this stage:
- Lifting unit30: moves downward
- Arms40: rotate forward
These two movements work together.
Figure created based on Tokukai 2020-168536 “Kaijo Robot” (FUJI Corporation).
As a result:
- The shoulders glide forward while the back straightens, creating an upright yet forward-leaning posture.
- The buttocks stay on the seat, while the center of gravity gradually shifts forward until it approaches the area above the feet.
This corresponds to Phase I through the beginning of Phase II in the human model.
Hug helps generate the forward momentum needed to stand while positioning the center of gravity over the feet before the buttocks leave the seat.
In the patent, the issue with older devices is noted:
Some devices lift the upper body while the center of gravity remains behind, causing discomfort.
Hug addresses this by lowering the lifting unit while the arms rotate forward, helping the user lean forward naturally without lifting the trunk prematurely.
This reduces discomfort and creates a more natural transition.
Second Stage (late Phase II–Phase III)
Once the center of gravity enters the area above the feet, the second stage begins.
The movements shift as follows:
- Lifting unit30: changes from moving downward to moving upward
- Arms40: continue forward rotation
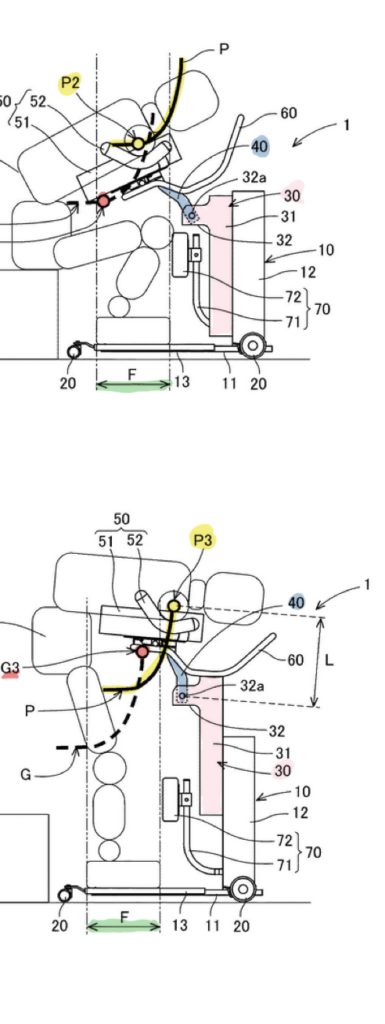
Figure created based on Tokukai 2020-168536 “Kaijo Robot” (FUJI Corporation).
As a result:
- The shoulder position moves forward and upward.
- The buttocks rise from the seat.
- The trunk remains slightly forward while the body is lifted.
In natural human movement, the trunk ultimately rotates back toward upright at the end of Phase III.
The patent diagrams show the shoulder path traveling “forward → upward → slightly back.”
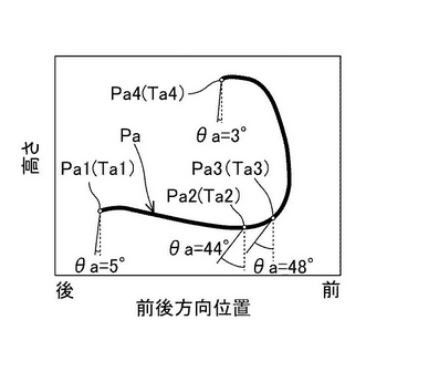
Source: Figures from Tokukai 2020-168536 “Kaijo Robot” (FUJI Corporation).
However, Hug’s arms40 do not rotate backward.
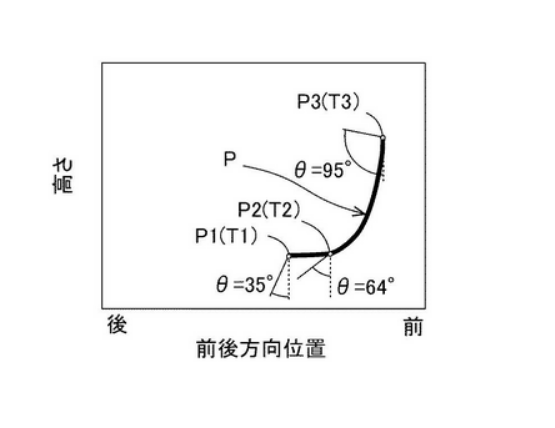
Source: Figures from Tokukai 2020-168536 “Kaijo Robot” (FUJI Corporation).
The final posture remains slightly forward-leaning.
This is because Hug is designed to finish in supported forward-leaning standing, not in a fully upright position.
Even so, the patent notes that the motion still allows users to “stand comfortably,” as the center of gravity shifts in a pattern similar to natural movement.
During this stage, the pads support the chest, underarms, and knees, helping users with reduced lower-limb strength or trunk control achieve standing.
Achieving Supported Standing (Phase IV)
After the second stage, the user reaches a slightly forward-leaning standing posture.
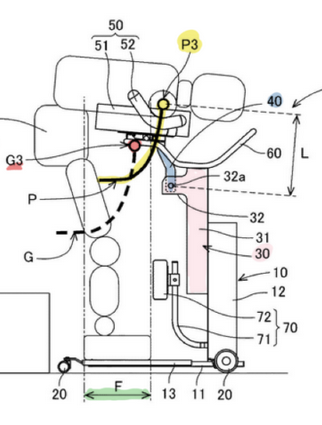
Figure created based on Tokukai 2020-168536 “Kaijo Robot” (FUJI Corporation).
The patent describes this as a state where “at least the lower body is standing.”
Although the trunk remains slightly flexed, the center of gravity is within the base of support, and the front pads prevent the user from falling forward.
This allows individuals with limited lower-limb strength or trunk stability to maintain a safe, supported stance.
Hug essentially reproduces the natural center-of-gravity shift seen in human standing, while ensuring stability through front support.
When Hug May Be a Good Fit — and When It May Not
Based on Hug’s mechanism and available product information, certain situations seem more compatible with its design, while others may require caution.
These points reflect my personal observations and should not be considered definitive guidelines.
Situations Where Hug May Be Useful
● Users who tend to buckle at the knees or lose balance
Front support can help stabilize posture even when trunk control is weak.
● Users with limited lower-limb strength
The lifting motion helps guide knee extension.
Even when the knees do not fully extend, the machine can assist the user into standing.
If the user can achieve more standing opportunities, this may also support contracture prevention.
● Toileting or bathing assistance
In toileting care, usually two caregivers may be involved: one supporting the user from the front and another managing clothing from behind.
Hug handles the front support, potentially allowing one caregiver to manage the task.
A waterproof model can be used in the bathroom or shower area, which may make perineal cleansing easier.
● When quick preparation is preferred
Because no sling is required, setup time may be shorter than with conventional lifts.
● When caregiver physical strain is a concern
Hug can support standing, facilitate short transfers, and assist with sitting, which may reduce physical workload.
Situations Where Hug May Be Difficult to Use
● Inability to bear weight due to fractures or paralysis
● Severe ankle contractures preventing proper foot placement
● Strong resistance to equipment use due to cognitive impairment
Hug in Real-World Settings
At the exhibition I attended in October, Hug’s booth was large and very crowded, showing the strong interest in this device.
I had the chance to try the machine myself.
The sensation of “floating upward” surprised me at first, but because my feet stayed firmly on the floor, I did not feel unsafe.
Compared with equipment that “lifts” you, the motion felt more natural and less forceful.
Although I have not used Hug in an actual care setting, a caregiving industry newspaper introduced a case in which a facility reported reduced caregiver burden for toileting assistance after adopting Hug.
According to the article, nearly 90% of residents at that facility are now able to use the toilet with transfer support, which suggests that the device may help promote dignity and functional independence.
Hug appears to be gaining attention not only because it assists users but also because its setup is simple and does not require attaching equipment to the body—an important factor in busy real-world environments.
In long-term care, technology is often introduced to address workforce shortages.
No matter how beneficial a device may be for users, if it requires complicated preparation, caregivers may not have the capacity to even try it.
Hug seems to strike a balance by being user-friendly for caregivers while offering physical support to users.
Cost is another important factor.
Depending on the model, the price varies.
Some facilities may be eligible for local government subsidies for care robots in Japan.
In home care, it may be available through Japan’s long-term care insurance rental program, with users paying 10–30% of the rental fee.
(For up-to-date information, please check with the manufacturer, local authorities, or your care manager.)
Closing Thoughts
When I first saw Hug, my impression was that it looked easy for caregivers to use.
After experiencing it and studying its mechanism more closely, I realized how many small engineering considerations are built into the design to help users stand with a sense of security.
Understanding how the movement works allows us to choose and use the device more appropriately according to each user’s condition.
In the next article, I plan to introduce another transfer-assist device that works on a different principle and compare how each type can be used effectively in care settings.
I currently share insights from both nursing practice and patent research, and I also write technical articles on care products and medical materials.
If you are interested in collaboration or would like support with product explanations or market research, please feel free to contact me through the form on my blog.
This article is for informational purposes only.
It does not guarantee accuracy, and decisions about product use or purchase should be made at your own judgment and responsibility.
References
Tokukai 2020-168536 “Kaijo Robot.”FUJI Corporation. 2020-10-15.P2020-168536A.
Ogawa, Koichi (2008).Irasuto de Manabu Kango Ningen Kogaku.Tokyo Denki University Press.
Kaigo no Hi Shimbun (2025-11-11 Issue).




